Selamunaleyküm
Pardus’ta ROS (Robot Operating System) yüklemeyi bir türlü başaramadım yardımcı olabilir misiniz
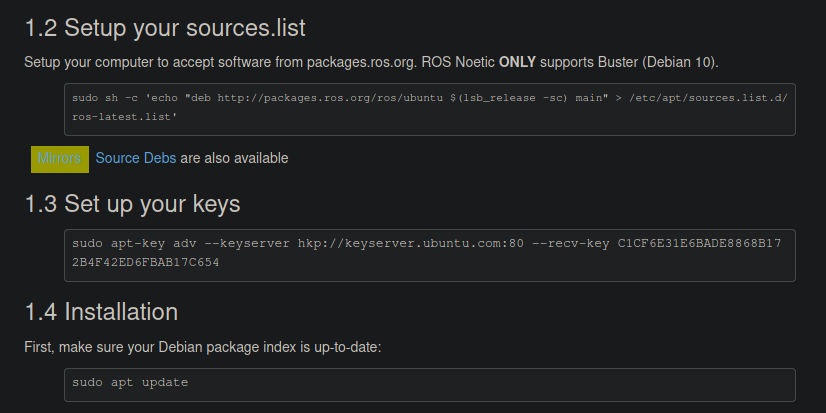
http://wiki.ros.org/noetic/Installation/Debian
buradaki depo ekleme işlemlerinden sonra şöyle bir hata alıyorum
Aynı: 1 http://depo.pardus.org.tr/pardus yirmibir InRelease
Aynı: 2 http://depo.pardus.org.tr/guvenlik yirmibir/updates InRelease
Aynı: 3 http://depo.pardus.org.tr/backports yirmibir-backports InRelease
Yoksay:4 http://packages.ros.org/ros/ubuntu yirmibir InRelease
Hata: 5 http://packages.ros.org/ros/ubuntu yirmibir Release
404 Not Found [IP: 64.50.233.100 80]
Paket listeleri okunuyor... Bitti
E: 'http://packages.ros.org/ros/ubuntu yirmibir Release' deposunda Release dosyası yok.
N: Böyle bir depodan güvenli bir şekilde güncelleme yapılamaz, bu nedenle depo devre dışı bırakılmıştır.
N: Depo oluşturma ve kullanıcı yapılandırması hakkında ayrıntılı bilgi için apt-secure(8) rehber sayfasında bulunabilir.
çözüm olarak
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu focal main" > /etc/apt/sources.list.d/ros-latest.list'
güncelliyince sıkıntı çıkmıyor ama iş yüklemeye gelince bir sürü bağımlılık hatası veriyor
sudo apt install ros-noetic-desktop-full
Paket listeleri okunuyor... Bitti
Bağımlılık ağacı oluşturuluyor... Bitti
Durum bilgisi okunuyor... Bitti
Bazı paketler kurulamadı. Bu durum, olanaksız bir durum istemiş
olduğunuzu ya da kararsız (unstable) dağıtımı kullandığınızı ve
bazı paketlerin henüz oluşturulamamış ya da oluşturulmakta
olduğunu gösterir.
Aşağıdaki bilgiler durumu çözmenize yardımcı olabilir:
Aşağıdaki paketler karşılanmamış bağımlılıklara sahip:
gazebo11 : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-iostreams1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-program-options1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-regex1.71.0-icu66 ama kurulabilir değil
Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: libprotobuf17 ama kurulabilir değil
gazebo11-common : Bağımlılıklar: ttf-dejavu-core ama kurulabilir değil
gazebo11-plugin-base : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-program-options1.71.0 ama kurulabilir değil
Bağımlılıklar: libdart6-utils (>= 6.9.2) ama kurulabilir değil
Bağımlılıklar: libprotobuf17 ama kurulabilir değil
libgazebo11 : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-iostreams1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-program-options1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-regex1.71.0-icu66 ama kurulabilir değil
Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: libbullet2.88 (>= 2.88+dfsg) ama kurulabilir değil
Bağımlılıklar: libdart6-collision-bullet (>= 6.9.2) ama kurulabilir değil
Bağımlılıklar: libgdal26 (>= 3.0.0) ama kurulabilir değil
Bağımlılıklar: libprotobuf17 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 6.0.0) ama kurulabilir değil
libignition-common3-graphics : Bağımlılıklar: libtinyxml2-6a (>= 6.0.0) ama kurulabilir değil
libignition-fuel-tools4 : Bağımlılıklar: libjsoncpp1 (>= 1.7.4) ama kurulabilir değil
Bağımlılıklar: libprotobuf17 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
Bağımlılıklar: libzip5 (>= 0.10) ama kurulabilir değil
libignition-msgs5 : Bağımlılıklar: libprotobuf17 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
libignition-transport8 : Bağımlılıklar: libprotobuf17 ama kurulabilir değil
libignition-transport8-log : Bağımlılıklar: libprotobuf17 ama kurulabilir değil
ros-noetic-actionlib : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-actionlib-tutorials : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-bondcpp : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-camera-calibration-parsers : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-python1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-python1.71.0-py38 ama kurulabilir değil
Bağımlılıklar: libpython3.8 (>= 3.8.2) ama kurulabilir değil
ros-noetic-class-loader : Bağımlılıklar: libpocofoundation62 (>= 1.9.2) ama kurulabilir değil
ros-noetic-compressed-depth-image-transport : Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgcodecs4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-compressed-image-transport : Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgcodecs4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-controller-manager : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-cv-bridge : Bağımlılıklar: libboost-python1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-python1.71.0-py38 ama kurulabilir değil
Bağımlılıklar: libboost-regex1.71.0-icu66 ama kurulabilir değil
Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgcodecs4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libpython3.8 (>= 3.8.2) ama kurulabilir değil
ros-noetic-depth-image-proc : Bağımlılıklar: libopencv-calib3d4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-diagnostic-aggregator : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-regex1.71.0-icu66 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-gazebo-plugins : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libprotobuf17 ama kurulabilir değil
ros-noetic-gazebo-ros : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: libprotobuf17 ama kurulabilir değil
ros-noetic-gazebo-ros-control : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
Bağımlılıklar: ros-noetic-transmission-interface ama kurulmayacak
ros-noetic-image-geometry : Bağımlılıklar: libopencv-calib3d4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-image-proc : Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-image-publisher : Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgcodecs4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-videoio4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-image-rotate : Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-image-transport : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-image-view : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-highgui4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgcodecs4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-videoio4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-interactive-markers : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-kdl-parser : Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-laser-assembler : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-laser-filters : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-nodelet : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-pcl-ros : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libpcl-common1.10 (>= 1.10.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libpcl-features1.10 (>= 1.10.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libpcl-filters1.10 (>= 1.10.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libpcl-io1.10 (>= 1.10.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libpcl-search1.10 (>= 1.10.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libpcl-segmentation1.10 (>= 1.10.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libpcl-surface1.10 (>= 1.10.0+dfsg) ama kurulabilir değil
ros-noetic-pluginlib-tutorials : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-rosbag : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-program-options1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-regex1.71.0-icu66 ama kurulabilir değil
Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: ros-noetic-rosbag-storage ama kurulmayacak
ros-noetic-rosconsole : Bağımlılıklar: libboost-regex1.71.0-icu66 ama kurulabilir değil
Bağımlılıklar: liblog4cxx10v5 (>= 0.10.0) ama kurulabilir değil
ros-noetic-roscpp : Bağımlılıklar: libboost-chrono1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-roscpp-tutorials : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-rospack : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-program-options1.71.0 ama kurulabilir değil
Bağımlılıklar: libpython3.8 (>= 3.8.2) ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-rqt-image-view : Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: ros-noetic-rqt-gui-cpp ama kurulmayacak
ros-noetic-rqt-rviz : Bağımlılıklar: libboost-program-options1.71.0 ama kurulabilir değil
Bağımlılıklar: ros-noetic-rqt-gui-cpp ama kurulmayacak
ros-noetic-rviz : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-program-options1.71.0 ama kurulabilir değil
Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
ros-noetic-rviz-plugin-tutorials : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-stage-ros : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-stereo-image-proc : Bağımlılıklar: libopencv-calib3d4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-tf : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-tf2-ros : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
Bağımlılıklar: ros-noetic-tf2-py ama kurulmayacak
ros-noetic-theora-image-transport : Bağımlılıklar: libopencv-core4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
Bağımlılıklar: libopencv-imgproc4.2 (>= 4.2.0+dfsg) ama kurulabilir değil
ros-noetic-turtle-actionlib : Bağımlılıklar: libboost-thread1.71.0 ama kurulabilir değil
ros-noetic-urdf : Bağımlılıklar: libboost-filesystem1.71.0 ama kurulabilir değil
Bağımlılıklar: libtinyxml2-6a (>= 5.0.0) ama kurulabilir değil
E: Sorunlar giderilemedi, tutulan bozuk paketleriniz var.
Pardusun kendi depolarında var onu yüklediğim zaman
http://wiki.ros.org/noetic/Installation/Debian

buradaki source oluşmuyor ve ne kadar aradıysam da bulamadım
sonucunda da böyle bir hata aldım
@pardus:~$roscore
... logging to /home/bismih/.ros/log/7af0f256-69de-11ed-817f-55d5c923ba1d/roslaunch-pardus-2194.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
RLException: Invalid <param> tag: Cannot load command parameter [rosversion]: command [['rosversion', 'roslaunch']] returned with code [1].
Param xml is <param name="rosversion" command="rosversion roslaunch"/>
The traceback for the exception was written to the log file
ne yapabilirim tavsiyeleriniz bekliyorum inşAllah
aklıma gelenler distrobox veya nvidia docker ile ubuntu kurmak ama direk kendi sisteminde olsa dah iyi olurdu
 yükleme yapılabiliyor.
yükleme yapılabiliyor.